Quite often, we are asked to derive results without necessarily thinking too hard about their significance. This is a particular problem with mechanics questions, and the chance to gain insight into a situation can be missed amid a forest of algebra. Here is a question that suffers rather seriously in this respect. When I first came across it, it looked interesting: I had never thought about the combination of a spring and a circular path before, and I was pretty curious. The question as posed is not that hard, but there is so much going on here that I reckoned it would repay some serious investment of time to figure out. What you get here is a much smoothed out version of my rocky and at times frustrating journey. I’ll only address part (i); part (ii) seems to me to be a bit too obscure to be worth writing about here, though perhaps I’ll tackle it at some point.
You may have got used to my asking you a question to tackle before looking at the answer. This month, I'm giving you the whole story without the "thinking breaks", so you will have to figure out for yourself when to stop and try something before reading on.
Here it is:
It’s important to think about what the question does and does not tell us. It tells us that the particle is free to move around the wire circle, but it gives no information about where it starts, what its speed is at some particular point, or what its motion looks like. There are also some assumptions implied but not explicit in the question. Principal among these is that the spring is ideal: it obeys Hooke’s Law at all times, and it is infinitely compressible, so that it can achieve zero length.
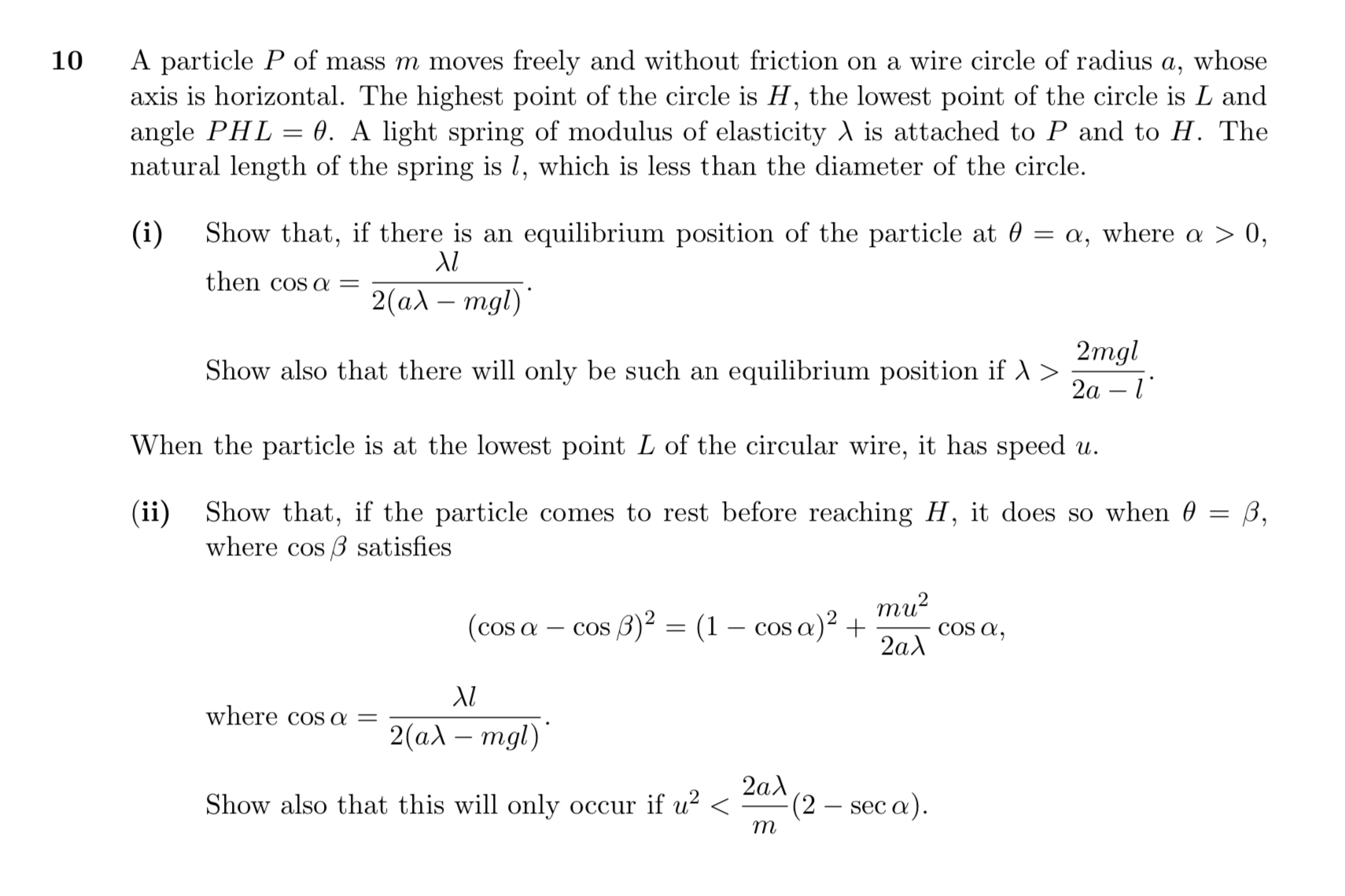
So, first things first, we’ll draw a diagram to illustrate the information that we are in fact given:
I don’t think we’ll need the letters P, H, and L, so I’ll keep the diagram as uncluttered as possible by leaving them out.
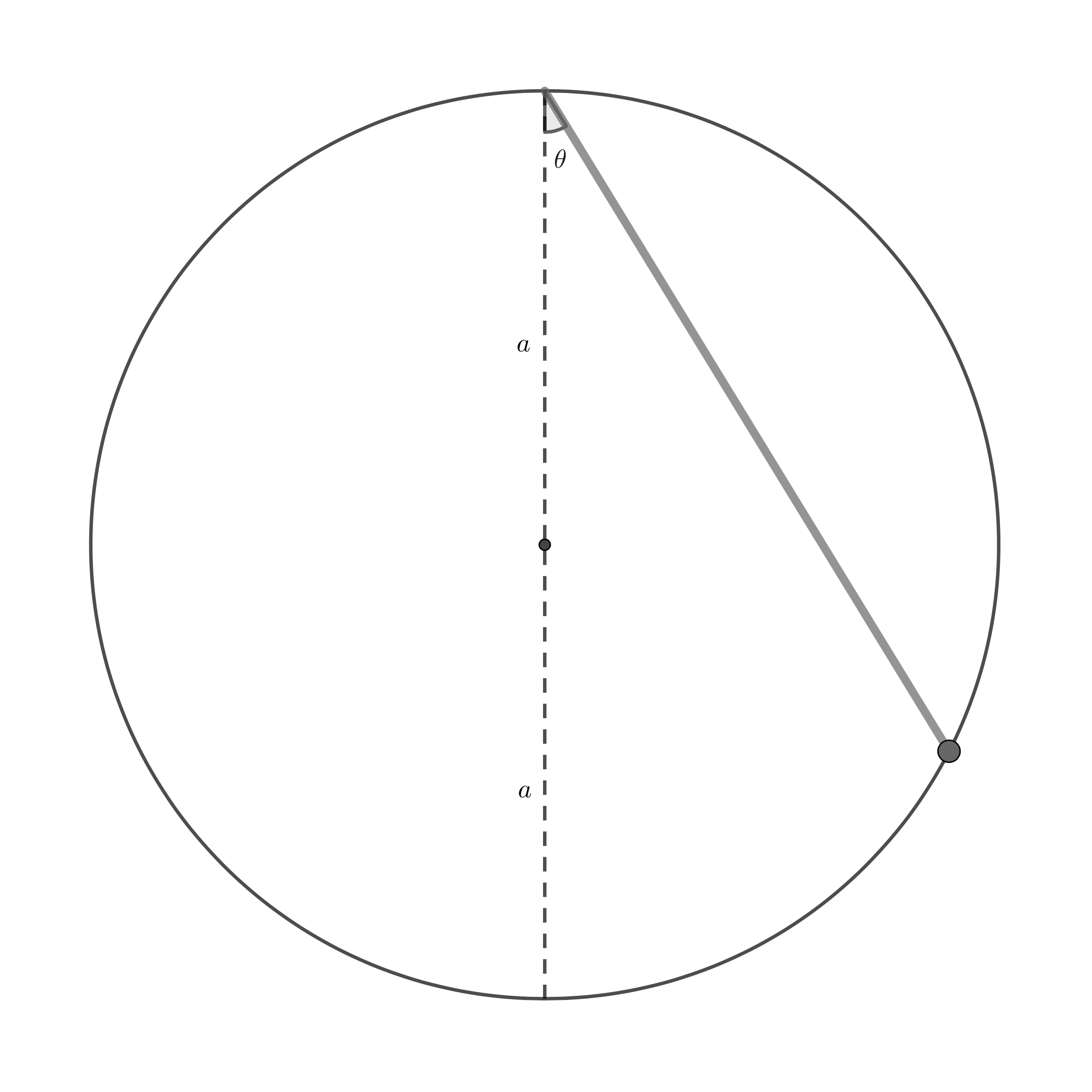
Next, let’s add some forces:
There are three: the weight, the force exerted by the spring, and the normal reaction exerted by the wire (which might go towards the centre sometimes). It’s reasonably easy to make some mistakes here: you might, perhaps, forget the normal reaction, but instead include a “centrifugal” force. There is, though, no actual force toward the centre. To be sure, there is a resultant force whose radial component keeps the particle travelling on a circular path, but it would be a basic error to include this on the diagram: it is not a separate force.
This looks a bit tricky, so I recommend simplifying things first: what happens without the spring? We know that if the bead is given an initial velocity at the bottom, it will either go all the way round the circle or it will oscillate from side to side without ever reaching the top. What will happen if we add the spring? If the spring is very weak, it won’t make much difference, so it’s effect is clearly going to depend on its strength.
Back to our diagram.
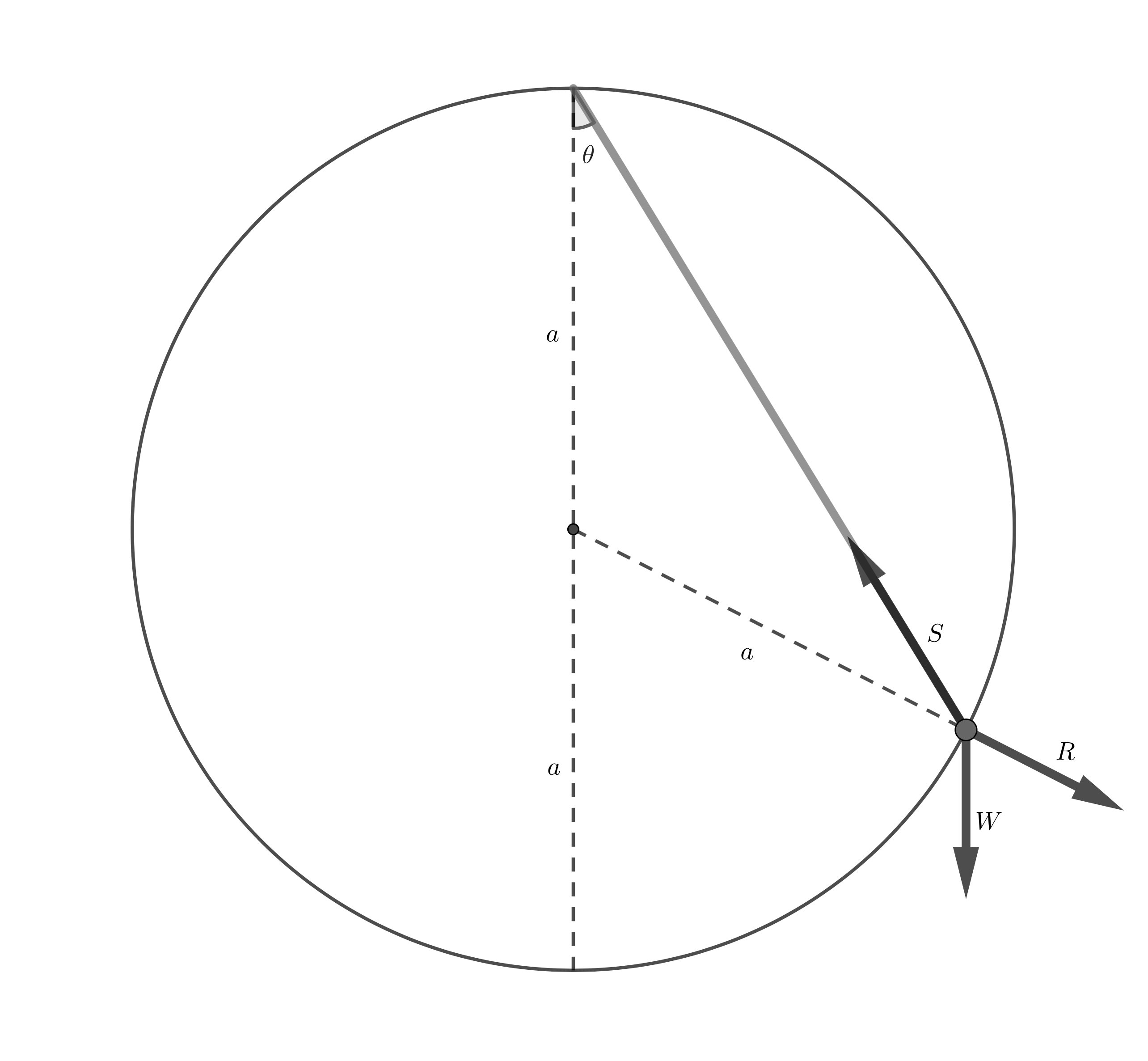
We don’t immediately know the spring force. For this, we need to calculate the extension of the spring, and for this, we need the length of the spring in the diagram. It’s pretty easy to get this by dividing an isosceles triangle into two right-angled triangles:
So the spring length is \(2a\cos\theta\).
We also need a couple of other angles, which I’ve included in the diagram.
We are told that \(0\lt l\lt 2a\), so with the particle at the bottom of the circle, the spring force is toward the top of the circle; if the bead is high enough, though, the spring will be shorter than its natural length and the force will be in the opposite direction. The spring length is \(2a\), whereas its natural length is \(l\), so the extension is \(\pm(2a-l)\): positive for extension, negative for compression.
Hooke’s Law, according to which the spring force is proportional to the ratio of the extension to the natural length, now tells us exactly what the force is. So we know \(\boldsymbol W\) and \(\boldsymbol S\): the force we don’t know is the normal reaction, \(\boldsymbol R\).
Any calculations we do, therefore, cannot include \(\boldsymbol R\). However, if the particle is in equilibrium then the resultant force is zero, so the component of the force in any given direction is zero. There’s only one direction to choose that does not include \(\boldsymbol R\): the direction tangential to the wire. This component is:
$$W\sin 2\theta-S\sin\theta$$The question talks about a point of equilibrium. What can this mean? Equilibrium means that the resultant force is zero, and therefore that the acceleration vector is zero. We know, though, that for a particle to move in a circle, it must accelerate toward the centre of the circle. So the only way the component of the resultant force in the radial direction (that is, toward the centre) can be zero is for the particle to be stationary, and I don’t think this is what the question means. What it means, I reckon, is that only the tangential acceleration is zero: that is, the velocity has a local maximum or minimum value at a point that is neither the top nor the bottom of the circle.
The question gives a name to the angle at any point of “equilibrium”, \(\theta=\alpha\), so that:
$$W\sin 2\alpha-S\sin\alpha =0$$ From Hooke’s Law, we know that the spring force is proportional to the ratio of the extension to the natural length, so we can use what we know about weight and spring force: $$\begin{align*} &W\sin2\alpha=S\sin\alpha\\[6pt] \Rightarrow &mg\sin 2\alpha=\frac{\lambda (2a\cos\alpha-l)}{l}\sin\alpha\\[6pt] \Rightarrow &2mg\sin\alpha\cos\alpha =\frac{\lambda (2a\cos\alpha-l)}{l}\sin\alpha\\[6pt] \Rightarrow &\sin\alpha=0 \text{ or }2mg\cos\alpha =\frac{\lambda (2a\cos\alpha-l)}{l} \end{align*}$$ If \(\sin\alpha=0\), then \(\alpha=0\), which means the particle is at the bottom of the circle. At this point, there is no horizontal force at all, so the tangential acceleration is bound to be zero. That leaves us with the second solution. Some easy algebra gets us from here to the result: $$\cos\alpha=\frac{\lambda l}{2(a\lambda-mgl)}$$ and we have successfully completed the first part of the question. The wording of the question suggests pretty strongly that there will not always be a point of equilibrium, and it then asks about the conditions for this situation to arise. In particular, it asks about the strength of the spring that will bring this about. Why? Well, we know that without the spring, we have tangential force $$W\sin 2\theta$$ which is never zero except when \(\theta=0\) or \(\theta=\pm\frac{\pi}{2}\).No spring at all is just like saying \(\lambda=0\), which, according to our formula, gives
$$\cos\alpha=\frac{\lambda l}{2(a\lambda-mgl)}=0\Rightarrow \alpha=\pm \frac{\pi}{2}$$That is, the only possible point of equilibrium is when the particle is at the top. This is just like the bottom, though: tangential acceleration is bound to be zero.
On the other hand, for a very strong spring, when \(\lambda\) is very large, we have
$$\cos\alpha=\frac{\lambda l}{2(a\lambda-mgl)}\approx\frac{l}{2a}$$which is between \(0\) and \(1\), so this situation does arrive at a potential point of “equilibrium” that is neither the top nor the bottom.
So when is the spring strong enough to cause this “equilibrium” point?
Firstly,
$$ \begin{align*} &\cos\alpha\geqslant 0\\[6pt] \Rightarrow &a\lambda-mgl>0\\[6pt] \Rightarrow &\lambda>\frac{mgl}{a} \end{align*} $$Meanwhile, we also need
$$ \begin{align*} &\cos\alpha<1\\ \Rightarrow &\frac{\lambda l}{2(a\lambda-mgl)}< 1\\[6pt] \Rightarrow &\lambda l<2(a\lambda-mgl) \text{ [multiplying through by a positive]}\\[6pt] \Rightarrow &\lambda> \frac{2mgl}{2a-l} \end{align*} $$Putting these two results together, and noticing that \(\frac{2mgl}{2a-l}>\frac{mgl}{a}\), we get:
$$\lambda>\frac{2mgl}{2a-l}$$So we’ve cracked the question, but what on earth does it all mean? In particular, what difference does it make to the motion of the particle whether or not there is a point where the tangential acceleration is zero (or, in the meaning implied by the question, where the system is in equilibrium)? This is the interesting part!
To answer this question, I feel I need to know what the graph of \(v\) against \(\theta\) or against time looks like. As things stand, I don’t have an equation relating these quantities. All I know is that tangential force\(=W\sin2\theta -S\sin\theta\), so that $$m\frac{\text{d}v}{\text{d}t}=mg\sin2\theta-\frac{\lambda(2a\cos\theta-l)}{l}$$We can solve this differential equation, because
$$v=2a\times\text{ angular velocity}=2a\frac{\text{d}\theta}{\text{d}t}.$$Notice that the angle at the centre is \(2\theta\), which is where the comes from in this equation.
Now the chain rule comes to our rescue:
$$\frac{\text{d}v}{\text{d}t}=\frac{\text{d}\theta}{\text{d}t}\times \frac{\text{d}v}{\text{d}\theta}=\frac{v}{2a}\frac{\text{d}v}{\text{d}\theta}$$and we have
$$m\frac{v}{2a}\frac{\text{d}v}{\text{d}\theta}=mg\sin2\theta-\frac{\lambda(2a\cos\theta-l)}{l}.$$
To solve this, we need an initial condition, so we’ll say that at the bottom, when \(\theta=0\) and \(t=0\), the velocity is \(u\).
There’s another way to proceed, though, without using a differential equation at all: energy!
Both ways will get to the same result, but I’m going the energy route.
At the bottom:
kinetic energy is \(\frac{1}{2}mu^2\)
gravitational potential energy is zero (or at least, we may as well take the bottom as the zero level of gravitational potential energy)
elastic potential energy is \(\frac{\lambda(2a-l)^2}{2l}\)
Anywhere else, the height of the particle above the bottom of the circle is \(1-\cos2\theta\), so that:
kinetic energy is \(\frac{1}{2}mv^2\)
gravitational potential energy is \(2mga(1-\cos2\theta)\)
elastic potential energy is \(\frac{\lambda(2a\cos\theta-l)^2}{2l}\)
The total energy at any point must be constant, so that
$$\frac{1}{2}mu^2+\frac{\lambda (2a-l)^2}{2l}=\frac{1}{2}mv^2+mga(1-\cos2\theta)+\frac{\lambda (2a\cos\theta-l)^2}{2l}.$$
That’s much easier than setting up and solving a differential equation!
Now I can use this equation to draw the graph of \(v\) against \(\theta\). At least, I can in theory; in practice, I don’t fancy doing so by hand. This is where graphing software really comes into its own, and Geogebra makes light work of it.
Before I do so, let’s see what the minimum value of \(u\) is for the particle to reach the top. If it just gets to the top with zero velocity, we will have \(\theta=\frac{\pi}{2}\) and \(v=0\), so
$$\frac{1}{2}mu^2+\frac{\lambda (2a-l)^2}{2l}=2mga+\frac{\lambda l}{2}$$
For the particle to reach the top, then, we must have
$$\begin{align*}
&u^2\geqslant 4ga+\frac{\lambda l}{m}-\frac{\lambda (2a-l)^2}{lm}\\[6pt]
\Rightarrow &u^2\geqslant 4ga+\frac{4\lambda a}{lm}(l-a)
\end{align*}$$
To make life simpler, I remember that I can choose any units I like for length, time, and mass. Here are some choices that should make life really quite a bit simpler:
$$a=1,\;m=1,\;g=10$$
and I’ll use them for the purposes of drawing the graph.
This gives me the equation:
$$u^2+\frac{\lambda(2-l)^2}{l}=v^2+20(1-\cos 2\theta)+\frac{\lambda(2\cos \theta-l)^2}{l}.$$
I will still need 3 parameters \(l,\,m,\,u\), and the graph will change as these change. Here are four possibilities, with a few questions. I’ll address the questions at the end, once you’ve had a chance to try them yourself.
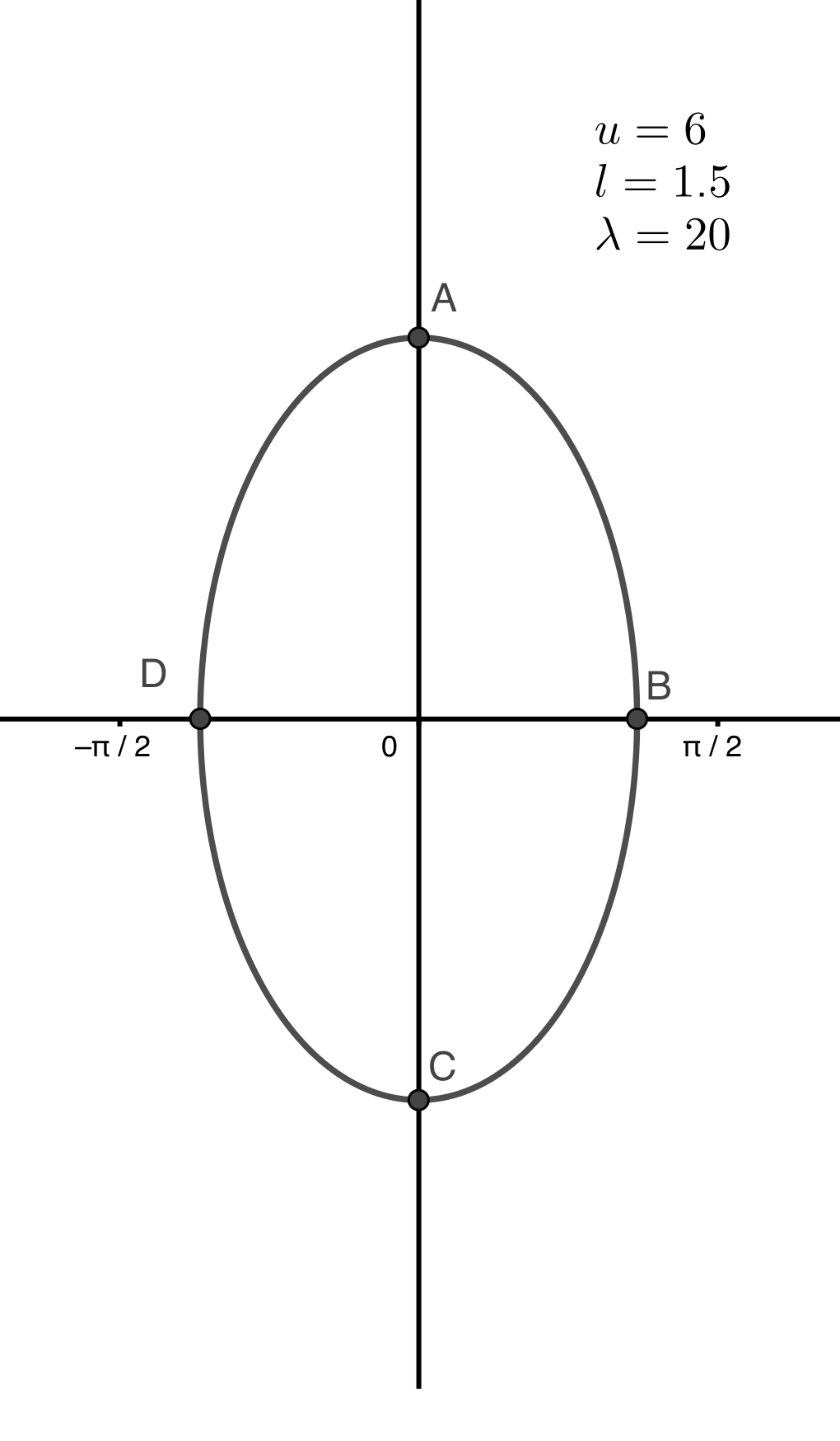
What is happening to the particle on the circular wire at the moments that correspond to points A, B, C, and D on the graph?
Is there an equilibrium point where tangential acceleration is zero, apart from at the bottom of the circle?
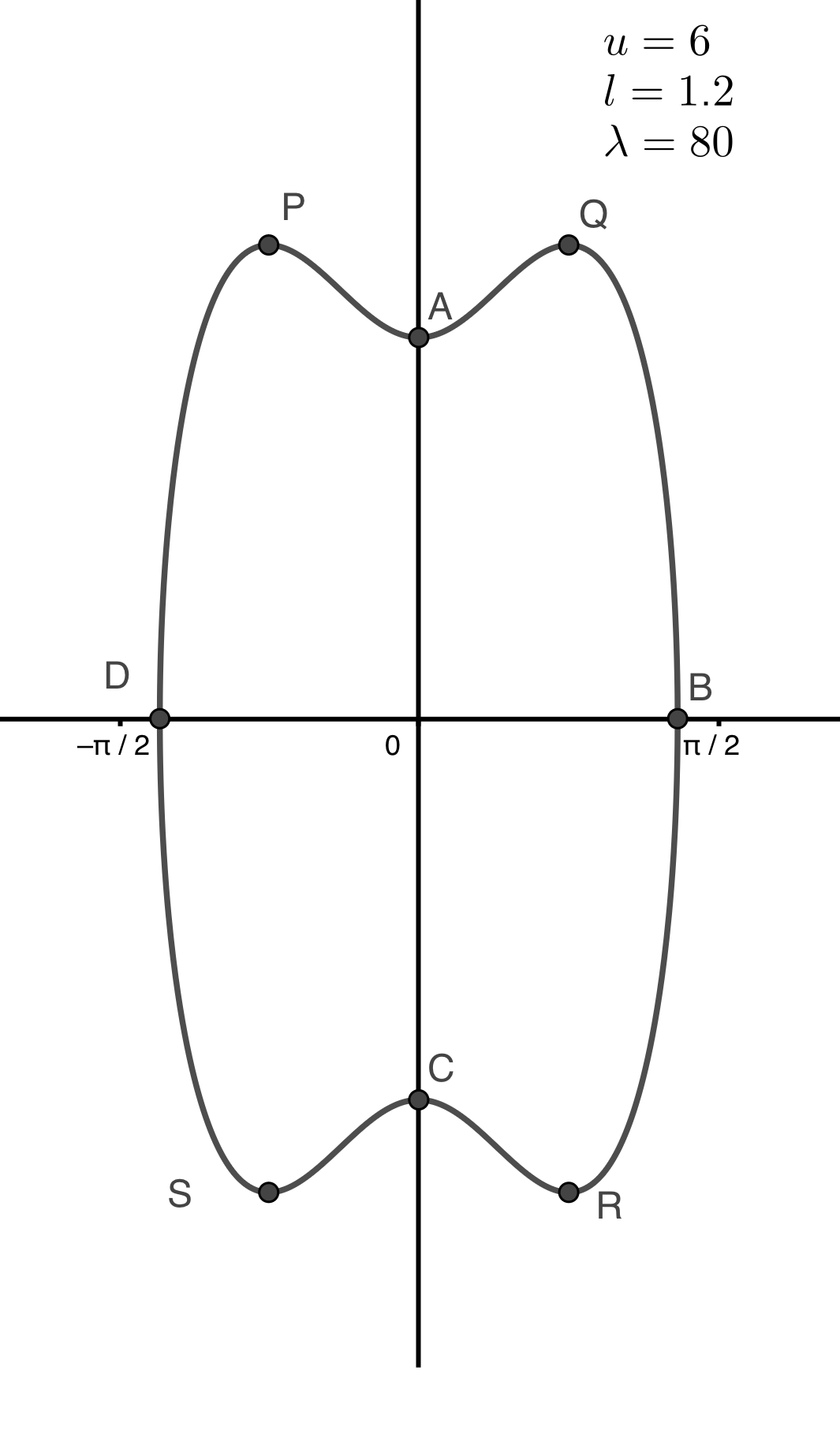
Here, the spring is stronger and shorter. What difference has this made? In particular, what is happening at P, Q, R, and S?
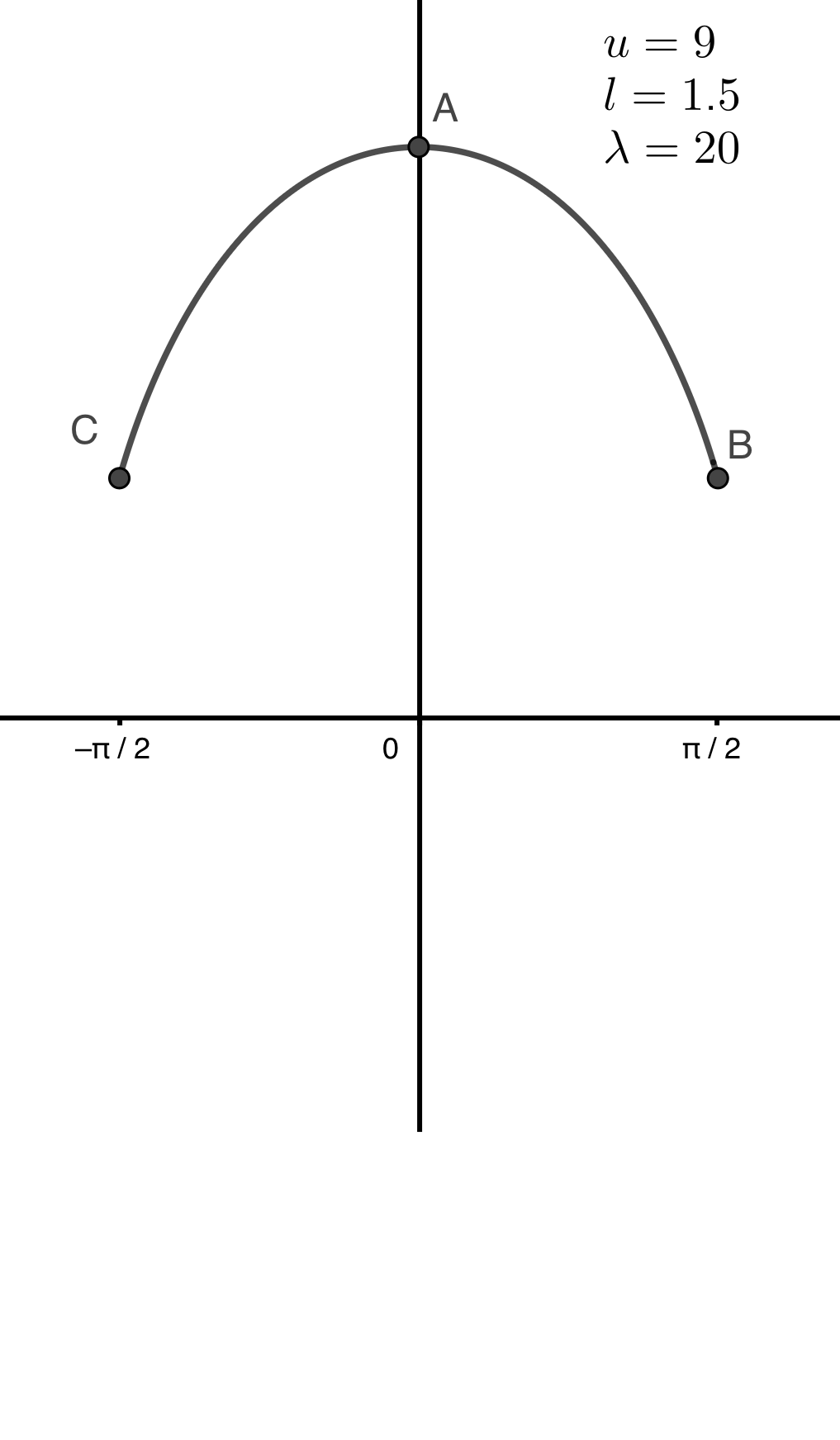
Back to the weaker spring, but with greater speed at the bottom. How does this graph relate to the motion around the wire circle?
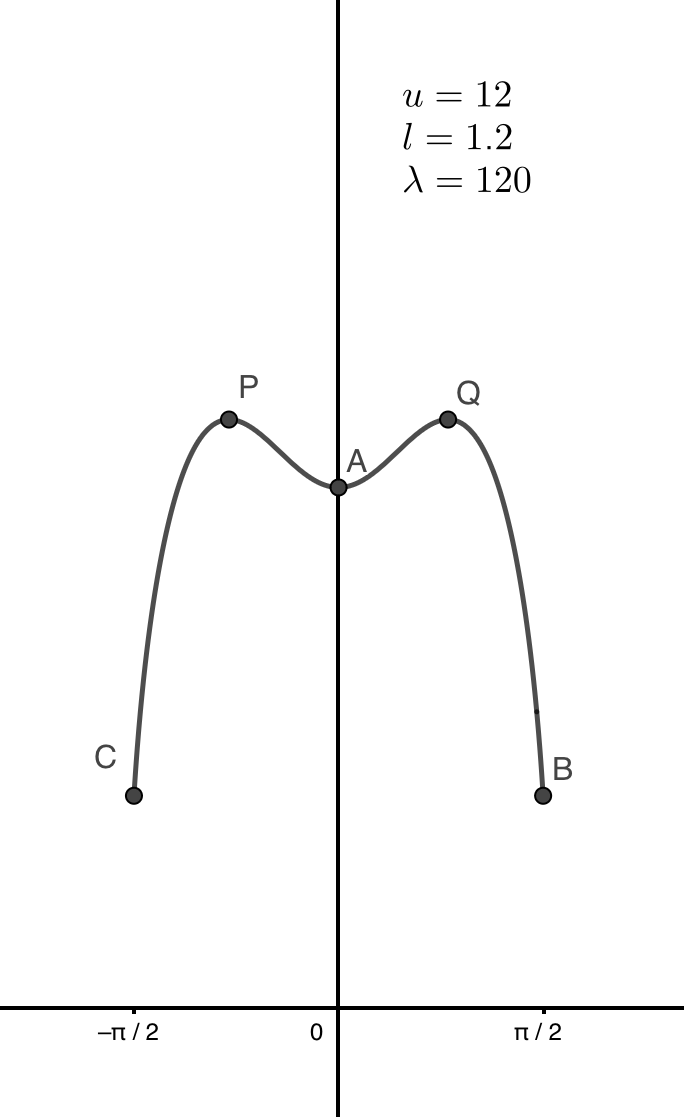
And lastly, still a high speed at the bottom, but now with the stronger spring. What has changed?
The first graph is slightly deceptive in that it can give the impression that the bead goes all the way round the circle. Actually, the velocity is sometimes positive, sometimes negative, so the particle must change direction. Meanwhile, \(\theta\) never reaches \(\tfrac{\pi}{2}\). The particle is oscillating about the bottom point on the circle, never reaching the top. At point A, it is at the bottom, heading off in the positive direction (let’s say that’s anticlockwise). At point B, it is stationary, and on the point of changing direction; at point C it is going back through the bottom point, this time in the clockwise direction. Point D is like point B, but on the other side.
One thing to notice: at B and D, the gradient is infinite; that is,
$$\frac{\text{d}v}{\text{d}\theta}=\infty.$$
This does not mean, though, that the acceleration is infinite.
Remember that
$$\frac{\text{d}v}{\text{d}t}=\frac{\text{d}\theta}{\text{d}t}\times\frac{\text{d}v}{\text{d}\theta}.$$
However, at points B and D, velocity is zero, so that \(\frac{\text{d}\theta}{\text{d}t}=0\), whereas the acceleration, \(\frac{\text{d}v}{\text{d}t}\), is not zero. Does that explain why the tangents at B and D are vertical? I hope so!
In graph two, the situations at A, B, C, and D are as before, but now we have some points, P, Q, R, S, where . So the particle sets off from A, but instead of slowing down as it would without the spring or with the weak spring, it actually speeds up to start with. As the spring gets closer to its natural length, it’s influence decreases, and the particle starts to slow down again. At B, it changes direction, with velocity following exactly the same sequence, though negative.
Graph three is also deceptive: it doesn’t look as though the particle goes all the way round the circle. But it does! The velocity is always positive, and \(\theta\) reaches \(\frac{\pi}{2}\). The point to notice here is that B and C represent the same moment; because we are taking \(\theta\) to be negative on the left-hand side, it jumps from \(\frac{\pi}{2}\) to \(-\frac{\pi}{2}\) as the particle passes through the top point.
And lastly, the stronger spring means the particle speeds up as it leaves the bottom point, rather than slowing down immediately as it would without a spring at all or with a weak spring.
Before leaving the graphs, remember that for the bead to get to the top, we must have
$$\begin{align*}
u^2\geqslant 4ga+\frac{4\lambda a}{lm}(l-a)
\end{align*}$$
which, when we have chosen our simple units, becomes
$$\begin{align*}
u^2\geqslant 40+\frac{4\lambda }{l}(l-1)
\end{align*}.$$
We also found that, for a point where the tangential acceleration is zero (apart from at the top and bottom), we must have
$$\lambda>\frac{2mgl}{2a-l}$$
which becomes
$$\lambda>\frac{20l}{2-l}.$$
Check that the values of the parameters on the graphs do actually produce, in the graphs, the effects that these inequalities predict.
Well, we have answered part (i), but, much more than that, we have gained a pretty solid understanding of the way that the spring works in conjunction with the circular wire. As I said at the start, this was not something that I had given any thought to previously, so I feel I have improved my mechanics knowledge quite significantly. I hope you do, too.